5 Cauchy’s Gift
5.1 The Trouble with One Dimension
A steel rod pulled in tension is the most convenient object in structural mechanics. It has one load direction, one stress, one strain, and one material constant. The problem fits on a single line of algebra. It is, in a meaningful sense, not the world.
Real structures are three-dimensional. A bolt in a flange carries tension along its axis and shear across its threads, simultaneously. A pressure vessel wall is stretched in two perpendicular directions at once — circumferentially and longitudinally — and compressed through its thickness. The corner of a steel frame, where a beam meets a column, carries combinations of bending moment, axial load, and shear that interact in ways a one-dimensional analysis cannot capture.
What Thomas Young gave engineers was essential but incomplete. He provided a material property — the modulus of elasticity — and a one-dimensional relationship between stress and strain. What he could not provide, because the mathematical tools did not yet exist in convenient form, was a description of stress and strain as three-dimensional quantities. He knew that the one-dimensional version was incomplete. The completion was the work of Augustin-Louis Cauchy, working in Paris in the 1820s.
5.2 Cauchy
Augustin-Louis Cauchy was among the most productive mathematicians in history, which is saying something in a field that produced Euler and Gauss in the same era. He published approximately 789 papers — a number that strains credulity until you read the papers and realize that many of them are short, dense communications on specific problems, the nineteenth-century equivalent of journal letters. He made fundamental contributions to real analysis (the rigorous foundation of calculus), complex analysis, differential equations, optics, and mechanics. Several theorems, a theorem in number theory, a formula in complex analysis, and two integral theorems carry his name.
He was also, by several accounts, insufferably self-righteous — a devout Catholic who occasionally refused to collaborate with scientists whose politics or religion he disapproved of, and who once declined a professorship rather than take an oath that conflicted with his religious convictions. This made him difficult in person and extraordinary on paper.
In 1822, Cauchy presented to the French Academy of Sciences a paper that established the modern concept of stress as a mathematical object. It was the missing piece that would allow Hooke’s Law to be extended from the one-dimensional rod to the full three-dimensional solid.
5.3 Stress at a Point
Before Cauchy, engineers and mathematicians had a practical notion of stress — force per unit area — but they had not examined it carefully as a function of orientation. If you take a small element of material inside a loaded solid and ask what forces act on it, the answer depends on which face of the element you are looking at. A face oriented perpendicular to the loading direction experiences a different force per unit area than a face oriented parallel to it.
Cauchy’s insight was to make this orientation-dependence precise and systematic. He defined the traction on a surface as the force per unit area acting on that surface, and he showed that the traction on any surface through a point can be calculated from the tractions on three mutually perpendicular surfaces through the same point. This means that the state of stress at a point — the complete description of all the forces acting within the material at that location — is captured by the tractions on three perpendicular faces.
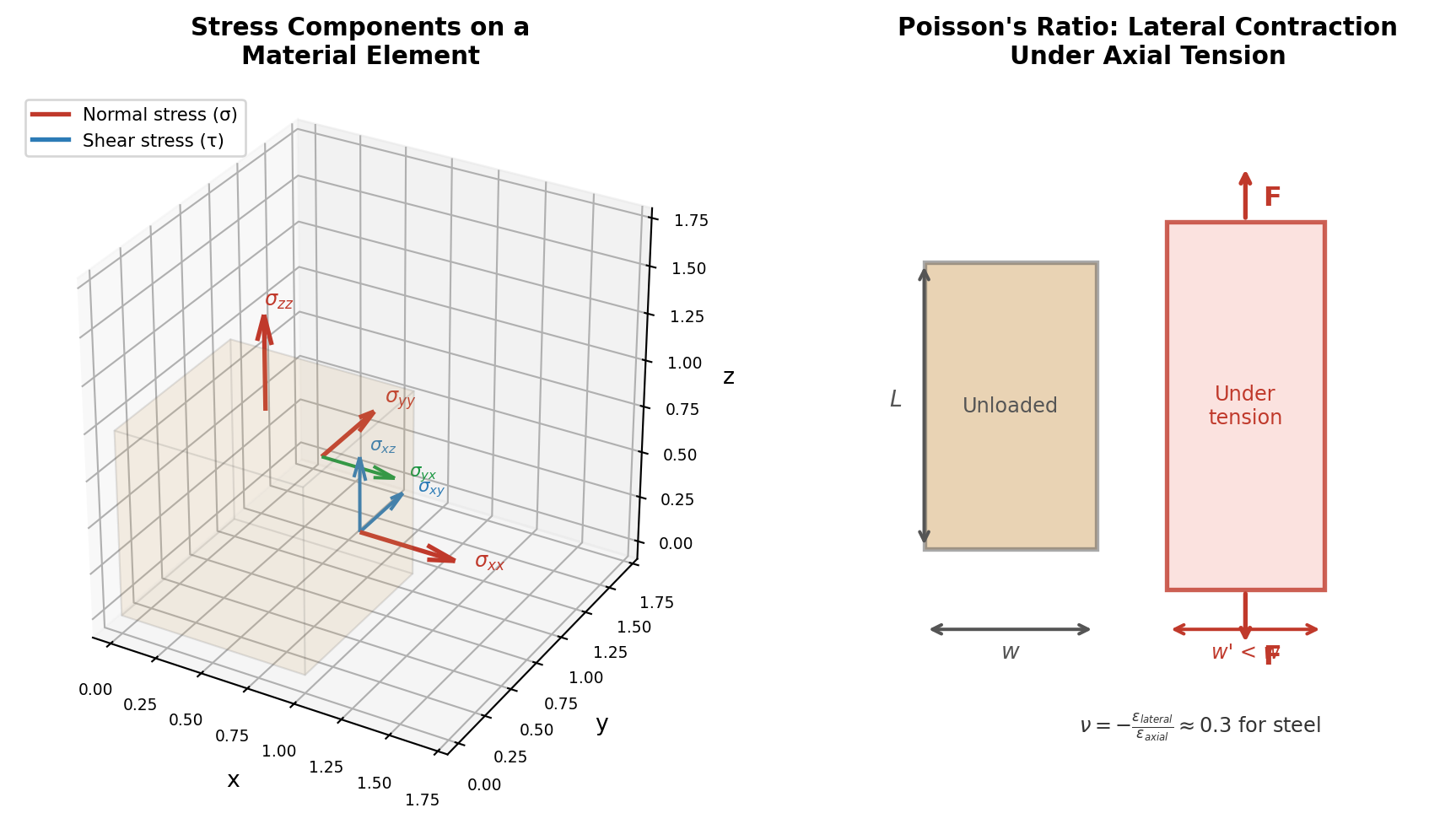
Each of these three faces has a traction vector that can be decomposed into three components: one normal to the face (pushing or pulling it) and two parallel to the face (sliding it in two perpendicular directions). This gives three faces times three components each, for a total of nine numbers that completely describe the stress state.
These nine numbers form what is now called the stress tensor. In the compact notation of modern mechanics, it is written as a three-by-three matrix:
\[\boldsymbol{\sigma} = \begin{pmatrix} \sigma_{xx} & \sigma_{xy} & \sigma_{xz} \\ \sigma_{yx} & \sigma_{yy} & \sigma_{yz} \\ \sigma_{zx} & \sigma_{zy} & \sigma_{zz} \end{pmatrix} \tag{5.1}\]
The diagonal components — \(\sigma_{xx}\), \(\sigma_{yy}\), and \(\sigma_{zz}\) — are the normal stresses: they act perpendicular to their respective faces, pulling or pushing the material apart or together. The off-diagonal components — \(\sigma_{xy}\), \(\sigma_{xz}\), \(\sigma_{yz}\), and their counterparts — are the shear stresses: they act parallel to the faces, trying to slide one part of the material past another.
Cauchy also showed that the stress tensor must be symmetric — that is, \(\sigma_{xy} = \sigma_{yx}\), \(\sigma_{xz} = \sigma_{zx}\), and \(\sigma_{yz} = \sigma_{zy}\). This symmetry follows from the requirement that a small element of material not spin spontaneously under load — a condition called moment equilibrium. The symmetry reduces the nine independent numbers to six. Six numbers are required to fully describe the state of stress at a single point in a three-dimensional solid under load. No more, no less.
The strain tensor has exactly the same structure. Six independent components describe the deformation state at a point: three normal strains (elongation or contraction in three directions) and three shear strains (angular distortion in three planes).
5.4 Poisson’s Ratio
While Cauchy was developing the tensor framework, his French colleague Siméon Denis Poisson was measuring something that every person has observed but few have quantified: when you stretch a material in one direction, it contracts in the perpendicular directions.
Pull a rubber band between your fingers. As it stretches in the direction you are pulling, it gets noticeably narrower. This lateral contraction is not an accident of rubber’s construction. It is a nearly universal property of elastic materials. Steel does it. Concrete does it. Bone does it. Even rock does it, though far less dramatically than rubber.
Poisson defined the ratio of lateral contraction to axial extension and called it, in effect, a material constant. We now call it Poisson’s ratio, denoted by the Greek letter \(\nu\) (nu). For a rod stretched by an axial strain of \(\varepsilon_{axial}\), the lateral strain is:
\[\varepsilon_{lateral} = -\nu\varepsilon_{axial} \tag{5.2}\]
The negative sign captures the fact that the lateral strain is compressive (negative) when the axial strain is tensile (positive). Poisson’s ratio is a positive number for almost all common materials. For steel and aluminum, \(\nu\) is approximately 0.3. For rubber, it approaches 0.5 — meaning rubber is nearly incompressible under tension, it stretches without losing volume. For cork, \(\nu\) is close to zero, which is why corks seal wine bottles effectively: they compress in the axial direction without expanding laterally into the bottle neck.
5.5 The Generalized Hooke’s Law
With Cauchy’s stress tensor, the strain tensor, and Poisson’s ratio in hand, the three-dimensional generalization of Hooke’s Law can be stated. For an isotropic material — one whose elastic properties are the same in all directions — the relationship between stress and strain requires exactly two material constants: Young’s Modulus \(E\) and Poisson’s ratio \(\nu\).
The three normal strain components are related to the three normal stress components by:
\[\varepsilon_{xx} = \frac{1}{E}\left[\sigma_{xx} - \nu(\sigma_{yy} + \sigma_{zz})\right] \tag{5.3}\]
\[\varepsilon_{yy} = \frac{1}{E}\left[\sigma_{yy} - \nu(\sigma_{xx} + \sigma_{zz})\right] \tag{5.4}\]
\[\varepsilon_{zz} = \frac{1}{E}\left[\sigma_{zz} - \nu(\sigma_{xx} + \sigma_{yy})\right] \tag{5.5}\]
Reading these equations in words: the strain in the \(x\)-direction equals the axial stress in \(x\) divided by Young’s Modulus, minus Poisson’s ratio times the sum of the stresses in the other two directions divided by Young’s Modulus. Stress in one direction produces strain in all three directions. This is the coupling that Hooke’s one-dimensional law could not express: every stress component affects every strain component, and the coupling is governed by Poisson’s ratio.
The shear strains are related to the shear stresses through the shear modulus \(G\):
\[\varepsilon_{xy} = \frac{\sigma_{xy}}{2G}, \quad \varepsilon_{xz} = \frac{\sigma_{xz}}{2G}, \quad \varepsilon_{yz} = \frac{\sigma_{yz}}{2G} \tag{5.6}\]
Importantly, \(G\) is not a third independent material constant. For an isotropic material, it is determined by \(E\) and \(\nu\):
\[G = \frac{E}{2(1+\nu)} \tag{5.7}\]
So two numbers — \(E\) and \(\nu\) — completely specify the linear elastic behavior of an isotropic material. Every structural calculation involving steel, aluminum, glass, or concrete ultimately rests on these two numbers and the tensor equations that Cauchy and Poisson provided.
5.6 The Achievement
Stepping back, the achievement is remarkable. In roughly 150 years — from Hooke’s 1678 anagram to Cauchy’s 1822 paper — the science of elasticity went from a qualitative observation about spring behavior to a complete mathematical framework for three-dimensional deformation of solid bodies. The key steps were: the discovery of linear proportionality between force and displacement (Hooke); the reformulation in terms of normalized, geometry-independent quantities (Young); and the extension to full three-dimensional tensor form (Cauchy and Poisson).
Each step was driven by practical need. Engineers were building larger bridges, larger ships, larger machines. They needed to predict, not merely guess. The mathematical framework that emerged from this need is, in its essentials, what every structural engineer uses today — though the calculations are now performed by computers and the structures involved would have been unimaginable to Hooke.
What remained, in 1822, was the application. Knowing how a material element responds to stress is not the same as knowing how a beam deflects, or how a column buckles, or how a pressure vessel fails. Translating material behavior into structural behavior requires assembling many infinitesimal elements — each obeying Hooke’s Law — into a complete structure, and determining how that structure deforms as a whole. This is the business of structural mechanics, and it has its own elegant results, which we take up in the next chapter.